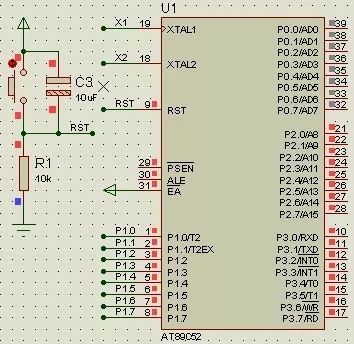
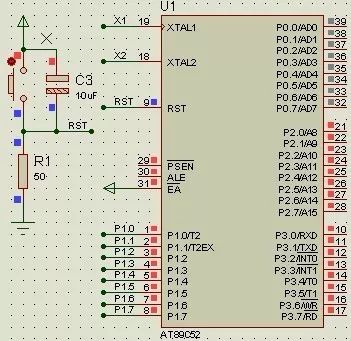
As shown in the diagram, when R1 is 10kΩ, the RST pin is high. However, when R1 is 50Ω, the RST pin is low. This clearly indicates that using a 10kΩ resistor is incorrect. If the microcontroller is in the reset state with this configuration, it won't function at all. The reason for this issue lies in the internal structure of the RST pin, which contains a transistor. Even when off, there's a small leakage current. When the pull-up resistor is too large, this weak leakage current can still pull the pin to a high level, causing unexpected behavior.
Second, the calculation of the LED series resistanceTypically, red LEDs have a forward voltage range of 1.6V–2.4V and a current range of 2–20mA. The brightness increases significantly between 2–5mA, and beyond 5mA, the brightness doesn’t change much. It’s important to choose the right resistor to avoid overloading the LED or making it too dim.

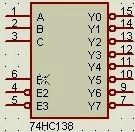
When the number of available I/O pins is insufficient, an expansion chip like the 74HC138 decoder can be used to expand the ports. This allows more signals to be controlled by the microcontroller.

Filter capacitors are divided into high-frequency and low-frequency types. High-frequency capacitors, usually 0.1µF (104), help eliminate noise and static interference from the power supply. Low-frequency capacitors, typically electrolytic capacitors (e.g., 100µF), are used to smooth out ripple and stabilize the power supply. They should be placed near power interfaces and high-power components like USB ports or motor drivers. Their voltage rating should be at least twice the system’s maximum operating voltage.
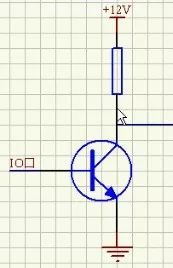
Fifth, the role of the bipolar transistor1. Switch function: A transistor can act as a switch. For example, when the base is high, the LED turns off; when low, it turns on. To calculate the current-limiting resistor, you need to consider the base current, which is about 1/100th of the collector current. Using Ohm’s Law, R = (Vcc - Vbe) / (Ic / 100).
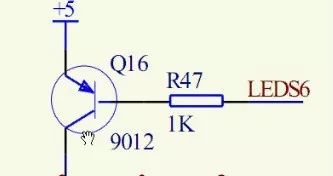
2. Amplification: The collector current is approximately 100 times the base current, making transistors useful for signal amplification.
3. Level conversion: A transistor can convert logic levels. When the base is high, the transistor conducts, pulling the output low. When the base is low, the output goes high.
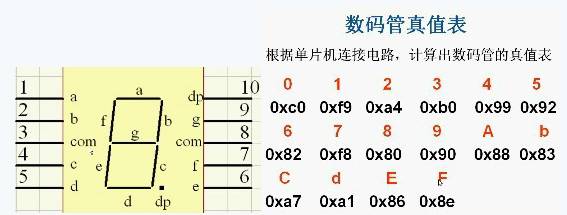
Digital tubes use segments labeled a to g, along with a decimal point (dp), to display numbers. Each segment lights up according to specific patterns, as shown in the truth table. Understanding these patterns is essential for proper programming and display control.
Microcontrollers often cannot drive high-current loads directly. In such cases, driver chips like the 74HC245 are necessary to handle the increased load and protect the microcontroller from damage.
Eighth, pull-up resistor selectionPull-up resistors are essential for ensuring stable signal levels. Key considerations include:
- Power consumption: Larger resistors reduce current draw but may not provide enough drive strength.
- Drive capability: Smaller resistors allow more current, improving signal integrity.
- High-speed circuits: Too large a pull-up resistor can cause signal distortion.
Common values are between 1kΩ and 10kΩ. Pull-down resistors work similarly, ensuring that unused pins don't float.
Ninth, crystal and reset circuitCrystal oscillators are crucial for timing in microcontroller systems. Common frequencies include 6MHz, 12MHz, 11.0592MHz, and 20MHz. Load capacitance is typically around 20pF, with two capacitors connected to ground. To test a crystal, measure the voltage between its pin and GND using a multimeter.
The reset circuit initializes the microcontroller, returning it to a known state. The reset time for a typical 51 MCU is about two mechanical cycles. Calculating the correct resistor and capacitor values for the reset circuit is essential and can be found in datasheets or online resources.
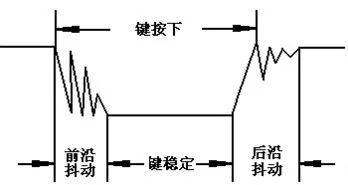
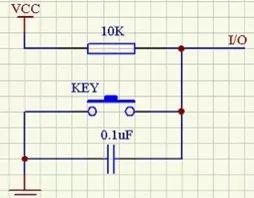
Tenth, button debounce and eliminationButtons are mechanical switches that can cause electrical noise when pressed or released. This "bounce" can lead to false readings. Two common methods to eliminate this are hardware and software debouncing. Hardware debouncing uses a capacitor to filter out the high-frequency noise, while software debouncing involves detecting the key press, waiting for a short delay (5–10ms), and then rechecking the state to confirm a valid press.
For Moto Glass,Moto G50 Screen Glass,Motorola Edge Screen Glass,Motorola Front Glass
Dongguan Jili Electronic Technology Co., Ltd. , https://www.jlglassoca.com